Distributional Method for Risk Averse Reinforcement Learning
Conference
64th ISI World Statistics Congress
Format: CPS Paper
Keywords: reinforcement_learning
Session: CPS 59 - Statistical methodology VI
Tuesday 18 July 5:30 p.m. - 6:30 p.m. (Canada/Eastern)
Abstract
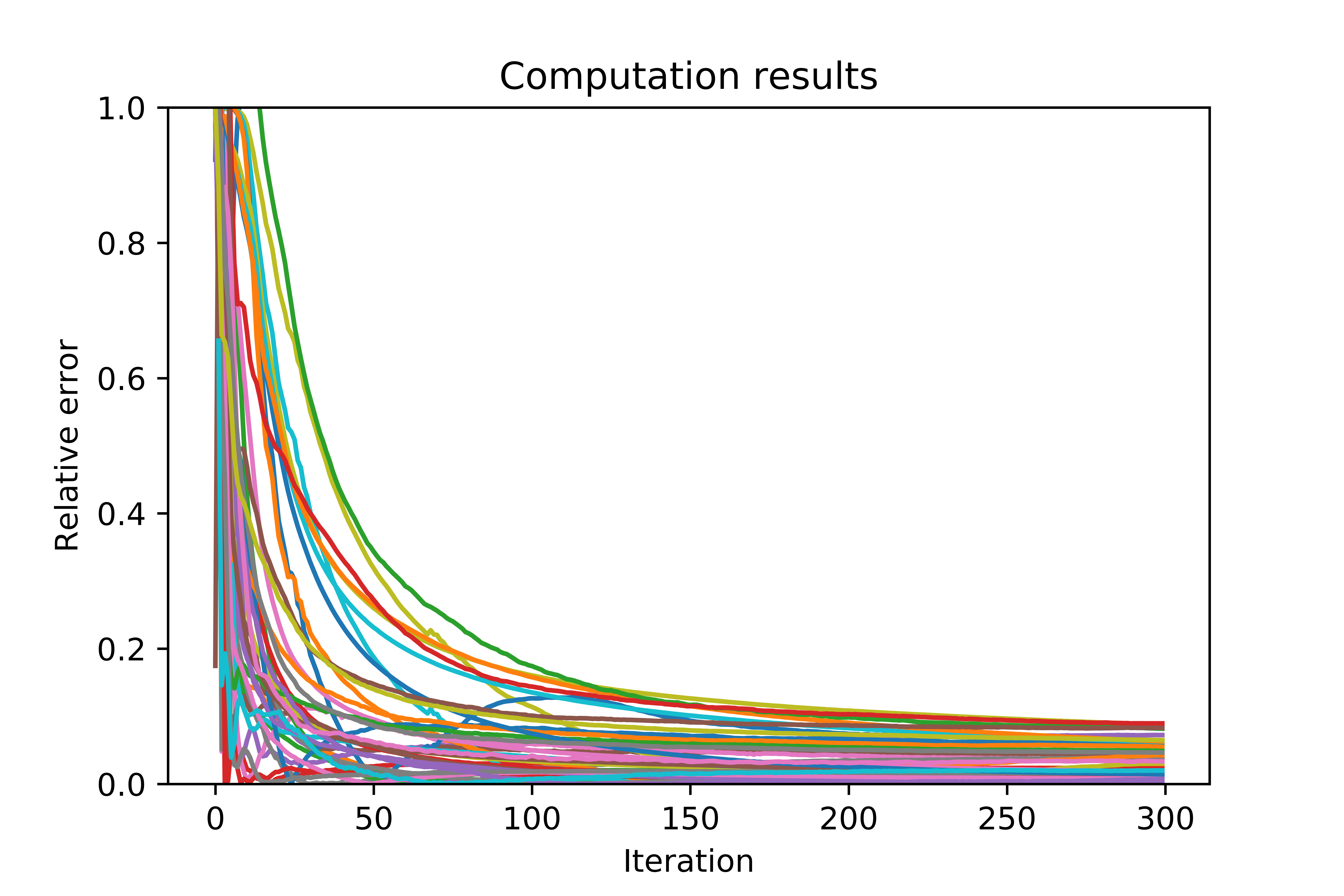
We introduce a distributional method for learning the optimal policy in risk averse Markov decision process with finite state action spaces, latent costs, and stationary dynamics. We assume sequential observations of states, actions, and costs and assess the performance of a policy using dynamic risk measures constructed from nested Kusuoka-type conditional risk mappings. For such performance criteria, randomized policies may outperform deterministic policies, therefore, the candidate policies lie in the d-dimensional simplex where d is the cardinality of the action space. Existing risk averse reinforcement learning methods seldom concern randomized policies, naive extensions to current setting suffer from the curse of dimensionality. By exploiting certain structures embedded in the corresponding dynamic programming principle, we propose a distributional learning method for seeking the optimal policy. The conditional distribution of the risk-to-go is casted into a specific type of function, which is chosen with in mind the ease of risk averse optimization. We use a deep neural network to approximate said function, illustrate that the proposed method mitigates the curse of dimensionality in the exploration phase, and explore the method’s performance with a wide range of model parameters that are picked randomly. This is a joint work with Sebastian Jaimungal and Nick Martin.
Figures/Tables
v